While the previous page (System Elements) introduced the fundamental elements of translating mechanical systems, as well as their mathematical models, no actual systems were discussed. This page discusses how the system elements can be included in larger systems, and how a system model can be developed. The actual solution of such models requires manipulation of the model into a useful form and is discussed elsewhere.
Contents
Newton's second law states that an object accelerates in the direction of an applied force, and that this acceleration is inversely proportional to the force, or
we will bring the right-hand side to the left and express this as
If we consider the m·a term to be a force, we are left with D'Alembert's law

We will call the m·a term D'Alembert's force. It is an inertial force that arises when you try to accelerate a mass. To visualize this consider pushing against a mass (in the absence of friction) with your hand in the positive direction. Your hand experiences a force in the direction opposite to that of the direction of the force (this is the -m·a term). The inertial force is always in a direction opposite to the defined positive direction (see the first example below).
This formulation (the sum of forces at a point is equal to zero) also makes analogy to electrical systems easier (the sum of all currents into a node is zero); you needn't concern yourself with this now.
Equations of motion for translating mechanical system depend on the application of D'Alembert's law. Using this principle we say that the sum of force on an object is equal to zero,
but we must also take the inertial force (m·a) as one of these forces. This inertial force is in the opposite direction from the defined positive direction.
We can apply D'Alembert's law to develop equations of motion for translating mechanical systems through the use of free body diagrams. To do this we draw a free body diagram for each unknown position in a system.
Consider a simple system with a mass that is separated from a wall by a spring and a dashpot. The mass could represent a car, with the spring and dashpot representing the car's bumper. An external force is also shown. Only horizontal motion and forces are considered.
There is only one position in this system defined by the variable "x" that is positive to the right. We assume that x=0 when the spring is in its relaxed state.
To develop a free body diagram we sum all the forces to zero. There are four forces:
The completed free body diagram is shown below
We sum all of these forces to zero and get
or

This equation is in our standard form that has system outputs (the unknown variables) on the left hand side and system inputs (the known variables) on the right hand side. this is sometimes called input-output notation.
We will often use "dot" notation, using one dot above a variable to denote differentiation:

In addition, we will also make it implicit that certain variables are functions of time and omit the "(t)" in equations. If we do so, the equations above become:
This is read as "m x double dot plus b x dot plus k x equals F sub e."
Recall that the definition of the positive direction is arbitrary. We could just as easilty have defined the positive direction to the left.
Note: Differences between the text in this example and the one above are given as bold italics.
Now the free body diagram still has four forces, but the reaction forces from the spring, friction and inertia have switched directions.
Our equations become (with implicit functions of time):
Note the changes of sign in the second equation and all those that follow.
Either set of equations (in terms of x or in terms of y) exactly, and identically, describes the behavior system. In the first case a positive force (to the right) will cause the system to start moving in the positive x direction (to the right). In the second case a positive force (to the right) will cause the system to start moving in the negative y direction (to the right). The definition of positive directions is arbitrary with respect to the behavior of the system.
The example above was relatively simple, but this method applies to more complicated systems as well.
The drawing above shows a system with two unknown positions, x1 and x2. In this case we need to make two free body diagrams, one for x1, and one for x2.
| Free body diagram at x1 | Free body diagram at x2 |
|
There are 5 forces acting:
|
There are 3 forces acting:
|
 |
 |
 We can put this in input-output form, and collect output variables:  or  |
 Now collect terms and rewrite  or  |
These equations represent a full mathematical model of the system. It is possible to combine the two differential equations into a single equation and solve, but that topic is covered elsewhere.
Going Further: To increase your understanding, and to underscore the fact that the choice of direction is arbitrary, this example is repeated with a different set of directions here. You may wish to examine them side by side. When choosing directions of motion the derivation of equations of motion is somewhat easier if all are chosen such that they have the same positive direction (e.g., all positive to the left or to the right).
You may have noticed some patterns in the directions of forces in free body diagrams. Some of these are enumerated here:
In the previous examples we used a free body diagram for each position in the diagram. However, sometimes the input to the system is a position (for example if attached to a constant velocity motor). In those cases, we don't need to include a free body diagram for that position.
Consider the system below. The leftmost position (xin) is an input to the system
Even though there are four positions defined (xin, x1, x2 and x3) we only need to draw free body diagrams for three of them since xin is known (it is a defined input to the system).
| Free body diagram at x1 |
 |
 |
|
Free body diagram at x2 |
 |
 |
|
Free body diagram at x3 |
 |
 |
So far we have always defined our displacements to be zero when springs are relaxed, neither compressed nor elongated. There are many situations when other definitions of zero position are easier to work with. For example, when gravity acts to extend (or compress) a spring, the gravitational force can be omitted from the analysis of system motion if the zero positions are taken when the system is at equilibrium with gravity. This is best demonstrated with an example.
In figure (a), the position "x" is defined to be zero when the spring is in its relaxed position. We can draw a free body diagram and find the equations of motion. We draw the applied force, fa, and the force of gravity, m·g, to be downwards. The forces k·x, b·vx and m·ax have their directions defined to be upward, i.e., opposite to the positive direction of x. (Just to reiterate, this is not to say that the forces will be upward, just that we define them to be positive in the upward direction when the displacement is positive in the downward directions).
 |
 |
When the system is at equilibrium and with no applied force, fa=0, the equation simplifies to

Let us call this distance x0.

Now consider the situation shown in figure (b). A new variable "z" is defined that is zero at the equilibrium position, z=x-x0, or x=z+x0. If we plug this into the equations (and using the fact that the derivatives of x0 are all zero) we get
This last equation tells us that if we define our zero position to be when the system is at equilibrium with gravity, that we can ignore the effect of gravity. This is a consequence of superposition. We are essentially taking the two inputs (gravity and fa) and treating them separately. Gravity gives a displacement of x0 from the position at which the spring is relaxed, and the displacement, z, is that due to the applied force. We could not make this separation if the system was not linear.
In short, if we take figure (b) and define z=0 when the system is at equilibrium with gravity (and applied forces are zero), we can immediately draw a free body diagram and write the equations of motion without considering gravity.
 |
 |
If zero position is taken to be that at which the system is at equilibrium with gravity, then gravity can be ignored in the analysis.
Often when making position measurements on a physical system, relative displacements are measured. This can greatly simplify a physical measurement (e.g., measuring the relative distance between two objects may be easier than measureing both of their absolute positions). However, it is important that D'Alembert's force (m·a) is measured relative to a fixed reference. This is clarified in the following example.
In the system below a mass, m, is hung from a rectangular frame by a spring (k). There is viscous friction between the frame and the mass on either side (b). The distance xin positive upwards) is measured from a fixed reference and defines the position of the frame. The distance z (measured downwards) is the position of the mass relative to the frame.
We will take the position, z, to be zero at equilibrium (so we need not consider gravity). There are then four forces in the free body diagram:

These are shown below, along with the resulting equations of motion.
 |
 |
Note: This configuration is used in seismographs; the frame sits on the ground (so xin is the position of the ground) and the distance between the mass m and the frame is recorded (for example, a pen between the mass and the frame records the postion z). In the diagram below (ref) the friction is not shown (but is accounted for by energy losses in the spring, air friction, pen friciton...). As the ground moves, the system is designed such that the position of the mass is relatively constant. The pen records the relative displacement, z, between the spring and the paper).
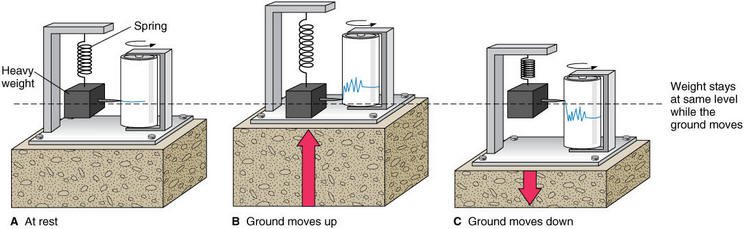
From: Physical Geology by Plummer, Carlson and Hammersley, McGraw Hill, 2016, page 386
In many cases springs or friction elements may be placed in series or in parallel with each other.
When two springs are placed in parallel (such that both springs have both ends in common), the effective spring constant adds. The diagram below shows two springs in parallel, with the ends of the springs attached. Also shown is a free body diagram, the resulting equations, and an equivalent spring.
| Springs in parallel | Free Body Diagram |
 |
 |
| Equations | Equivalent spring |
 |
 |
Whenever there are two springs in parallel, they can be replaced by an equivalent spring whose spring constant is the sum of those of the parallel springs. A similar statement can be made about friction elements.
Note that it is not always so obvious that springs are in parallel. Consider the example below.
| Springs in parallel | Free Body Diagram |
 |
 |
| Equations | Equivalent spring |
 |
 |
Because the ends of the spring are in common; both have one end attached to the mass (displacement=x), and one end connected to a fixed reference (displacment=0). An example of this that you have already seen is the seismograph, above - the friction elements are in parallel (one side is on the mass, and one on the frame) and so add in the free body diagram, and show up added in the equations of motion (as a "2b" term multiplied by the velocity).
Series Elements
If two friction elements are in series, such that they have only one end in common, and nothing else is connected to that end, the inverse of the equivalent friction coefficient is equal to the sum of the inverses of the coefficients of the individual elements. A similar statement holds for springs. This is shown below. Note: two free body diagrams are needed, because there are two unknown positions. Note also that the position "x" is the displacement between the ends of the dashpot b2 ("x" is taken to be zero initially) - it is not measured relative to a fixed reference.
| Dashpots in Series | Free Body Diagrams | Equations |
 The elongation of b2 is "x." The rightmost end of b2 has displacement "z" relative to a fixed reference. |
 |
 |
 |
 |
Now we can draw the equivalent free body diagram and solve for the equivalent dashpot:
| Free Body Diagram | Equations |
 |
 |
The last equation is often rewritten directly for beq
An example will show the utility of these concepts.
Consider the system below
 |
k1 = 20 N/m k2 = 10 N/m k3 = 20 N/m k4 = 15 N/m b1 = 4 N-s/m k2 = 3 N-s/m |
We can make simplifications based on parallel and series elements
 |
keq,a = k1 in parallel with k2 keq,a = k1 + k2 = 30 N/m keq,a = 20 + 10 = 30 N/m |
 |
keq,b = keq,a in series with k3 keq,b = keq,a·k3/(keq,a+k3) keq,b = 30·20/(30+20) = 12 N/m |
 |
keq,c = keq,b in parallel with k4 keq,c = keq,b + k4 keq,c = 12 + 15 = 27 N/m |
 |
beq = b1 in parallel with b2 beq = b1 + b2 beq = 3 + 4 = 7 N-s/m (though not as obvious, one side of each friction element is on the mass, and the other is on the fixed reference). |
So the resulting system is a simple mass-spring-dashpot system that is easily solved.
Note: Elements may not be connected in series if there is another element attached to their common endpoint. For example, k1 and k2 may not be connected in the image below because the friction element, b, is also connected to their common point.
When two (or more) spring or friction elements are in parallel (i.e., such that both ends of the elements are connected), their values add.

When two (or more) spring or friction elements are in series (such that they have one end in common, with nothing else attached at that node), the inverse of the values add.

For only two elements in series

It is possible to go directly from the system diagram to a state space model. Details are here system diagram to a state space model.
Thus far we have only developed the differential equations that represent a system. To solve the system, the model must be put into a more useful mathematical representation such as transfer function or state space. Details about developing the mathematical representation are here.
© Copyright 2005 to 2019 Erik Cheever This page may be freely used for educational purposes.
Erik Cheever Department of Engineering Swarthmore College