A state variable representation of a system is not unique. In fact there are infinitely many representations. Methods for transforming from one set of state variables to another are discussed below, followed by an example.
Consider the state space representation
We can define a new set of independent variables (i.e., T is invertible)

Though it may not be obvious we can use this new set of variables as state variables. Start by solving for q

(note: some textbooks use the matrix P=T-1 to define the transformation)
We can now rewrite the state space model by replacing q in the original equations
Multiply the top equation by T to solve for qˆ
We recognize this as a state space representation
with
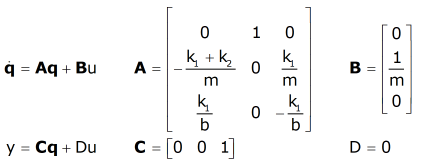
Consider the system below:
We have shown that the choice of state variables

yields the state space system
If we want a set of state variables that includes the position of the center of the dashpot ½(x+y) as well as the extension of the dashpot (y-x), find a new state variable representation.
Our new state variables are:
which we can write in terms of the old variables as:

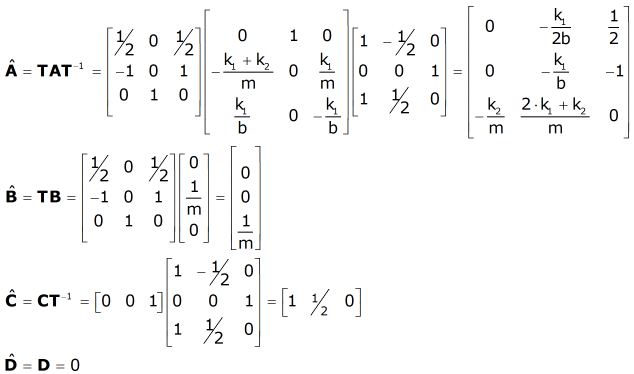
It can be shown that
so
with
© Copyright 2005 to 2019 Erik Cheever This page may be freely used for educational purposes.
Erik Cheever Department of Engineering Swarthmore College