Note: this document describes both time (step) response and frequency (Bode) response concepts. If you have not learned about frequency response yet you can either ignore the frequency response information, or you can click on this check box to hide it:
Lower order (1st and 2nd) are weel understood and easy to characterize (speed of system, oscillations, damping…, but his is much more difficult with higher order systems. One way to make many such systems easier to think about is to approximate the system by a lower order system using a technique called the dominant pole approximation. This approximation assumes that the slowest part of the system dominates the response, and that the faster part(s) of the system can be ignored. This is demonstrated below for two cases. The first case approximates a second order system by a (simpler) first order system. The second case approximates a third order system by either a first order system, or a second order system, depending on the pole locations of the original system.
Reduction of a second order system to first order
Consider an overdamped second order system (and its step response).
If the magnitude of β is very large compared to α (typically if β/α>5) we can write write approximations for the transfer function (assuming s is sufficiently small comparted to β), as well as an approximation for the step response.
Note that H(0) is unchanged for the exact and approximate transfer funtions. This is necessary to ensure that the final value of the step response, yγ(∞), is unchanged.
Recall that H(0)=yγ(∞) because (by the Laplace Transform final value theorem) yγ(t)|t→∞=s·Yγ(s)|s→0=s·H(s)/s|s→0=H(0).
Example 1, Second order, Moveable pole dominates
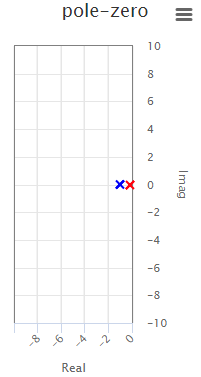
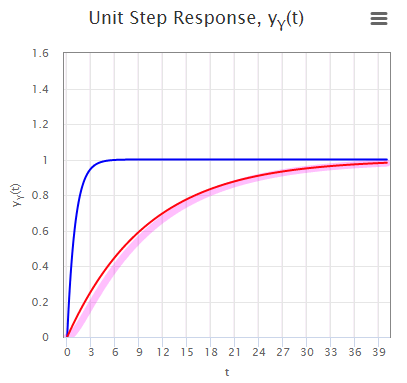
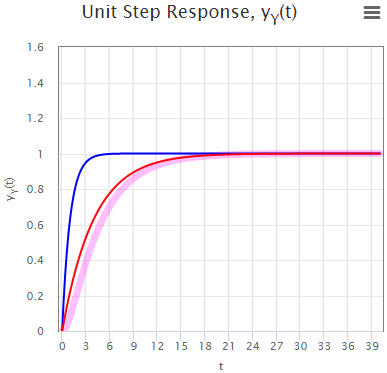
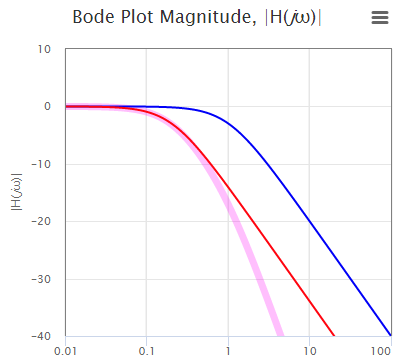
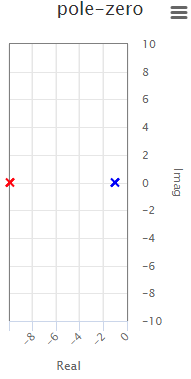
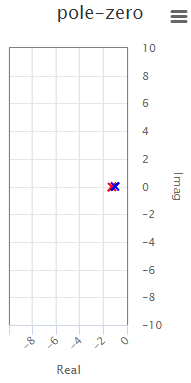
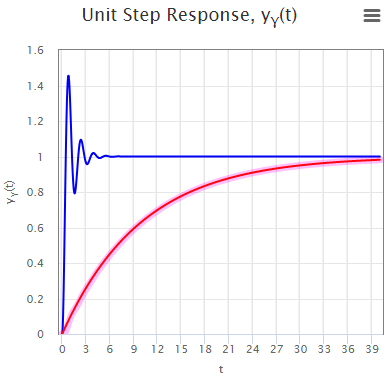
The graphs below correspond to the case when α=0.1 and β=1 (so β/α=10), followed by an explanation of each of the three graphs.
where Hdp(s) represents the dominant pole approximation. Note that the numerator of the approximation is chosen such that H(0)=Hdp(0).
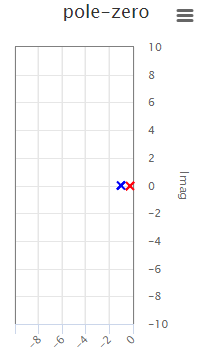
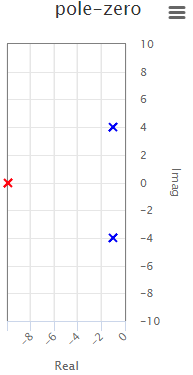
Pole-Zero plot: On the pole-zero plot the pole at s=-α is shown in red, and that for s=-β is blue. (Note: in these cases the value of β is fixed (i.e., the pole is fixed) but we will change the value of α.) Since α is so much closer to the origin in dominates the response. Note that when we say the poles are far apart, it is not physical distance that is of interest, but the ratio of the pole locations.
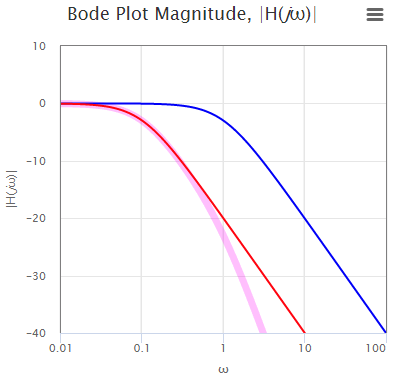
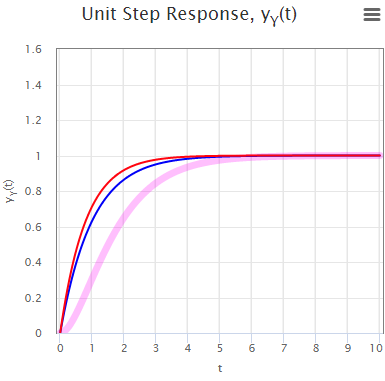
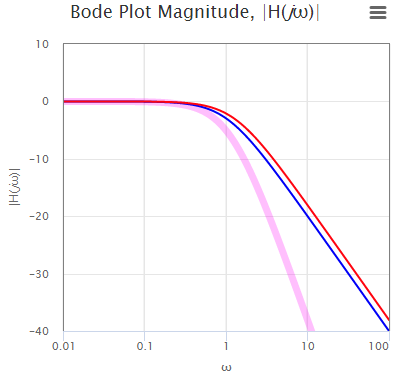
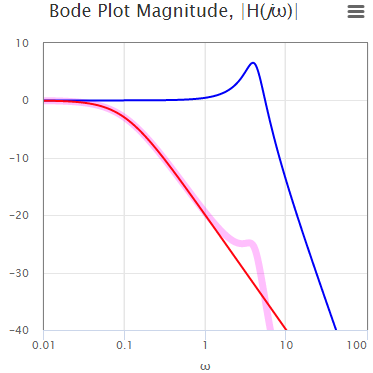
Time domain: The step response plot shows three plots: the magenta plot is the exact response, the red plot is the approximation assuming the pole at -α dominates (note that the red and magenta plots are very close to each other, so the dominant pole approximation is a good one), and the blue plot is the approximation assuming that the pole at -β dominates (which clearly it doesn't because the plot is nowhere near the exact response ls the exact step response — this plot is shown because later cases will move the pole at -α and as it moves far from the origin the pole at -β dominates). The exact response has two exponentials, a fast one with a relatively short time constant of 1/β and a much slower exponential with time constant 1/α. If we look at the overall resonse, the fast exponential comes to equilibrium much more quickly than the slow explonential. From the perspective of the overall response, the faster exponential comes to equilibrium (i.e., has decayed to zero) instantaneously compared to the slower exponential. Therefore, the slower response (due to the pole closer to the origin — at s=-α) dominates.The Bode plots are also pretty close at low frequencies (where the magnitudes are relatively large); they only differ when their magnitudes are small.
Frequency Domain: In this case the Bode plot starts dropping down at ω=α. Since β>>α, when we get to ω=β, the magnitude of the Bode plot is already so small that any increased attenuation is relatively unimportant. Therefore we can ignore the higher frequency pole, because the lower frequency pole dominates
Example 2: Second order, moveable pole dominates, but not as strongly
Example 2, Second order: If we increase α to 0.2, the approximation is still fairly good, but not not quite as good as when α=0.1, as we would expect.
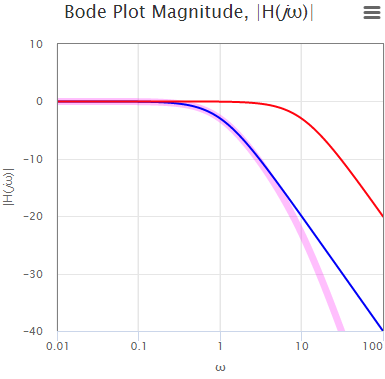
If we set α=10 and leave β=1, then the pole at s=-β=-1 dominates and a first order approximation considering only this pole (blue plot) is quite close to the exact response.
Note that the numerator of the approximation is chosen such that H(0)=Hdp(0)
Example 4: Second order, neither pole dominates
If we set α to 1.25, the two poles are very close to each other, so the dominant pole approximation cannot be applied (i.e., the magenta (exact) response is not at all close to the approximations in which a first order pole dominates (the red and blue lines). Note that the step response for this case has a different time scale than the previous two.
The dominant pole approximation can also be applied to higher order systems. Here we consider a third order system with one real root, and a pair of complex conjugate roots.
In this case the test for the dominant pole compare "α" against "ζω0". This is because ζω0 is the real part of the complex conjugate root (we only compare the real parts of the roots when determining dominance because it is the real part that determines how fast the response decreases). Note, that as with the previous case, that the DC gain of the exact system and the two approximate systems are equal. Note, again, that H(0) is unchanged for the exact and approximate transfer funtions. This is necessary to ensure that the final value of the step response (which is determined by H(0) is unchanged.
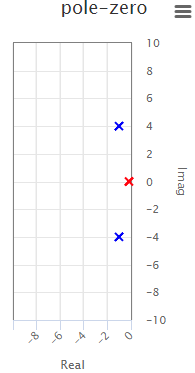
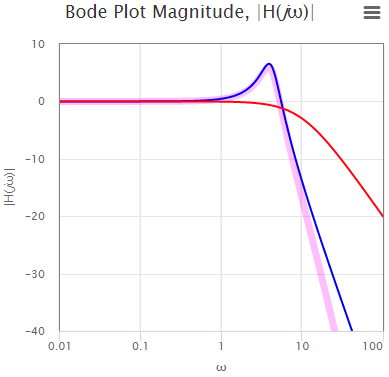
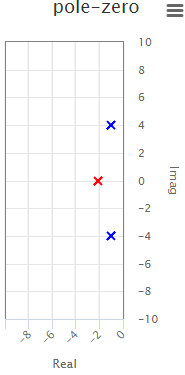
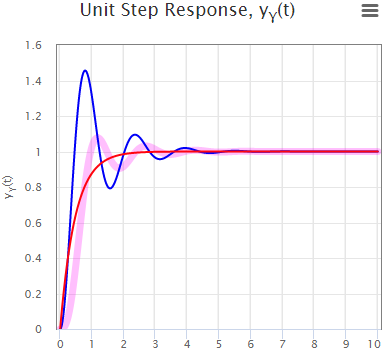
In the cases below, the second order poles are at s=-1±j4 (ζ=0.24 and ω0=√17=4.1) and are shown in blue. There are three sets of graphs. As before, the magenta line shows the exact response, the red line shows the response if the real root is assumed dominant) and the blue line shows the approximation with the complex roots dominant. Also as before, the location of the red root will change from graph to graph.
Example 5: Third order, real pole dominates
Here, α=0.1 and the real pole dominates. Therefore, the system behaves, approximately, like a first order system. The complex poles, which corersond to the fast part of the response, can be ignored. The results are described immediately following the graphs.
Note that the numerator of the approximation is chosen such that H(0)=Hdp(0)
Pole zero: The pole-zero map shows that the real part of the first order response is much closer to the origin than the real part of the complex conjugate poles.
Step Response: The magenta (exact) and red (due to pole at s=-α=-0.1) are very close since that is the pole that dominates in that case. The blue graph (in which the second order poles are assumed to dominate) is obviously a bad approximation and not useful, as expected.
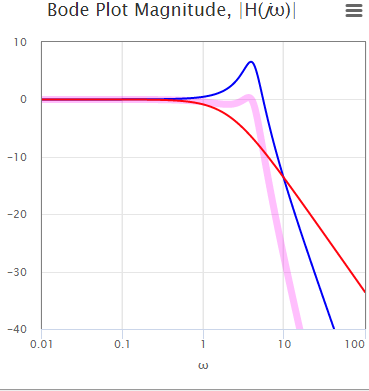
Frequency Domain: The magenta (exact) and red (due to pole at 0.1 rad/sec) Bode plots are very close until the frequency is between 1 and 10 rad/sec. By the time the exact (magenta) Bode plot deviates from the first order (red) plot, the system output is attenating by more than 20 dB. Again, as expected, the second order (blue) approximation is not useful.
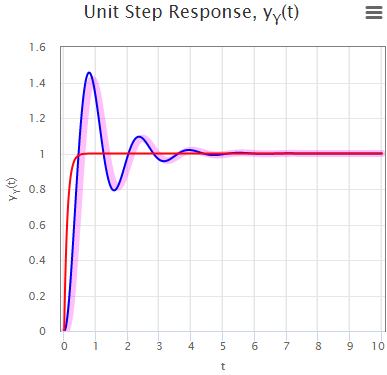
In this example α=10 and the complex poles dominates, so the system behaves, approximately, like a second order system. The real pole (which corresponds to the fast part of the response) can be ignored. Note that the time scale is different from the previous case.
Example 6: Third order, complex poles dominate
In this example α=10 and the complex poles dominate, so the system behaves as a second order system.
Numerical example: Approximating a second order system with a system first order
Note: this is very similar to example 3, above; only the numbers have changed.
Consider the transfer function \[H(s)=\frac{20}{(s+3)(s+30)}.\] Since we have one pole at s=-3, and one pole at s=-30, the pole at s=-3 will dominate, so the denominator of the transfer function is (s+3) and the dominant pole approximation has the form
\[H_{dp}(s)=\frac{?}{(s+3)}.\]
In order to find the correct value for the numerator we set
\[H_{dp}(0) = H(0) = \frac{20}{(3)(30)} = \frac{2}{9}\]
Note: this ensures that the final value to a step input is equal for the exact and approximate systems.
In order for this equation to hold, the numerator of the approximation must be equal to 2/3, so
\[H_{dp}(s)=\frac{2}{3}\frac{1}{(s+3)}.\]
Numerical example: Approximating a third order system with a first order system
Since the pole at s=-2 is a factor of 5 closer to the origin than either of the other poles, it will dominate the response. So the denominator is first order with s=-2, and the numerator is chosen such that H(0)=Hdp(0).
You might think that the pole at s=-1 would be dominant. However, the zero in the numerator is so close to the pole location, that they almost cancel each other out. In this case the dominant pole approximation cannot be applied. In fact, because the pole and zero almost canel out they have little affect on the system, and it can be approximated by
\[H\left( s \right) \approx \frac{1}{{(s + 10)}}\]
It is important to stress that this simplification comes from the fact that the pole and zero nearly cancel each other out, and not because of the dominant pole approximation.
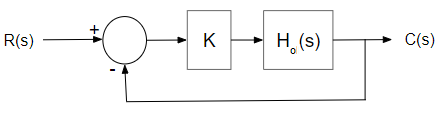
2) Placement in a larger system
This explanation really only makes sense if you've taken control theory — if you haven't please skip this part.
Consider a system Ho(s) in a closed loop system as shown. If
\[{H_o}\left( s \right) = \frac{{10}}{{\left( {s + 10} \right)\left( {s + 1} \right)}}\]
you might think that you could apply the dominant pole approximation with
\[{H_o}\left( s \right) \approx \frac{1}{{\left( {s + 1} \right)}}\]
but in this case this probably isn't approriate, depending on the value of K. .
To understand why the approximation may fail, consider the closed loop transfer function:
\[{H_{cl}}\left( s \right) = \frac{{K \cdot {H_o}\left( s \right)}}{{1 + K \cdot {H_o}\left( s \right)}} = \frac{{10 \cdot K}}{{{s^2} + 11s + K + 10}}\]
If K=
20.25, the transfer function becomes
\[{H_{cl}}\left( s \right) = \frac{{202.5}}{{{s^2} + 11s + 20.25 + 10}} = \frac{{202.5}}{{{{\left( {s + 5.5} \right)}^2}}}\]
This transfer function is critically damped; clearly it is not a good candidate for the dominant pole approximation.
Put another way: because the roots of a closed loop system can move dramatically as the gain of the system is changed (as shown by the root locus diagram), you cannot simply use the dominant pole approximation on a system that is in a loop (except in special circumstnaces - i.e., you know beforehand the range of K will not cause difficulties such as thos illustrated in this problem).
Key concept: Dominant pole approximation can simplify systems analysis
The dominant pole approximation is a method for approximating a (more complicated) high order system with a (simpler) system of lower order if the location of the real part of some of the system poles are sufficiently close to the origin compared to the other poles.
Interactive Demo
Select the type of the system (before dominant pole approximation)
Second Order
Third Order
You can use this demonstration to see how pole location affects the accuracy of a the dominant pole approximation as applied to a system. Start by choosing the original system with the radio buttons above. The transfer function of the chosen system will be displayed along with the pole zero diagram of the system. One of the poles is at s=-α and is displayed in red. You can move this pole, by 1) typing a number in the text box below, 2) moving the slider, or 3) clicking and dragging th e pole in the pole-zer diagram itself. The pole(s) shown in blue are fixed.
Choose location of α
Fixed pole is at s = -1 = -β.Moveable pole is at s = -1 = -α.$H\left( s \right) = K\frac{{\alpha \cdot \beta }}{{\left( {s + \alpha } \right)\left( {s + \beta } \right)}}$$H\left( s \right) = \frac{{\alpha \cdot \omega _0^2}}{{\left( {s + \alpha } \right)\left( {{s^2} + 2\zeta {\omega _0}s + \omega _0^2} \right)}}$
Three results are shown. The magenta plot corresponds to the exact response, the blue plot assumes the fixed pole is dominant, and the red plot assumes the moveable pole (at s=-α) dominates. Note that the time scale for the step response changes when α is small.
Try this:
Select the "Second Order System"
Set α=0.1. If you look at the results you will see that the moveable pole at s=-0.1 is much closer to the origin on the pole zero plot. The other plots show that the exact response can be approximated by a first order response in which the red (moveable) pole dominates (i.e., the exact response is well approximated by the red response).
Now set α=10. If you look at the results you will see that the fixed pole at s=-1 is much closer to the origin on the pole zero plot. The other plots show that the exact response can be approximated by a first order response in which the blue (fixed) pole dominates (i.e., the exact response is well approximated by the blue response).
Try sliding α from 0.1 to 10 and notice that toward the extremes the exact response is well approximated by a first order system, but not when the blue and red poles are near each other. Note that when we say the poles are far apart, it is not physical distance that is of interest, but the ratio of the pole locations.
Now select the "Third Order System" and set α to 10. The complex poles dominate and the output looks like that of a second order system.
Slide α to 0.1 and notice that the approximate response morphs from a second order underdamped response (α=10) to a first order response (α=0.1) as the first order pole dominates as it moves towards zero.