A phasor is simply a shorthand way of representing a signal that is sinusoidal in time. Though it may seem difficult at first, it makes the mathematics involved in tha analysis of systems with sinusoidal inputs much simpler. To start, we take a sinusoidal
signal in time defined by magnitude, phase and frequency (A, θ and ω)
\[f\left( t \right) = A\cos \left( {\omega t + \theta } \right)\]
and represent it in phasor form as a complex number with a magnitude and phase (A, and θ).
Note that frequency (ω) is not included, but is implicit in the concept of a phasor.
We frequently write the phasor in terms of its magnitude and phase.
\[\mathbf{F} = A \angle \theta\]
If we multiply the phasor, F, by
ejωt, we are simply rotating F by an angle ωt (i.e., the resulting vector has an angle of (ωt+θ).
\[{\mathbf{F}}{e^{j\omega t}} = A{e^{j\theta }}{e^{j\omega t}} = A{e^{j\left( {\omega t + \theta } \right)}} = A \angle \left( {\omega t + \theta } \right) \]
We can recover the time domain function, f(t), by taking the real part of this rotating vector.
\[f\left( t \right) = \operatorname{Re} \left\{ {{\mathbf{F}}{e^{j\omega t}}} \right\} = \operatorname{Re} \left\{
{A{e^{j\left( {\omega t + \theta } \right)}}}
\right\} = \operatorname{Re} \left\{ {A\left( {\cos (\omega t + \theta ) + j\sin (\omega t + \theta )} \right)}
\right\} = A\cos \left( {\omega t + \theta } \right)\]
The demo below illustrate the relationship between f(t) and F. There are sliders for changing
A, θ, ω and t. You can also change t by clicking and dragging in the graph on the right, or by hitting
the "Animate" button.
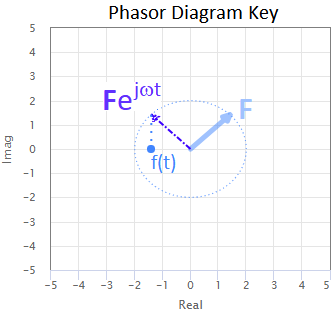
The graph on the left shows:
The phasor, F=A∠θ (a complex vector), as a thick blue arrow. as shown in the key to the right.
The time dependent vector, Fejωt, as a thin dotted blue arrow, that rotates counterclockwise as t increases.
The original function f(t)=Real{Fejωt}=A·cos(ωt+θ) as a blue
dot on the real axis. Note: we get the value of f(t) by dropping a vertical line from Fejωt to the real axis.
The graph on the right shows
f(t) for t=0 to 15 seconds shown as a blue line, with the current value of f(t) shown as a blue dot.
Simple Phasor Demo
f(t) =
___
Important things to note
The variable "A" determines the length of F and the amplitude of f(t). Modify "A" with slider (or text box) to demonstrate.
The variable "θ" determines the angle of F and the phase of the time domain
function. If θ=0, we get a cosine. Modify θ to see its effect on F and f(t). Note that θ is shown in degrees, but when you actually do calculations, you will want to use radians (ωt is in radians).
The variable "ω" doesn't affect F at all. Increasing ω increases the
frequency of f(t), and also increases the speed of rotation of Fejωt. Modify ω to see for yourself.
As "t" increases, Fejωt rotates in a counterclockwise
direction. You can vary t with the textbox, the slider or by clicking and dragging in the time domain (rightmost) graph.
The phasor, F, is a constant. We multiply by ejωt to make a rotating
vector, Fejωt (so we need to know the frequency, ω).
f(t)=Re{Fejωt}
Key Concept: A sinusoidal signal can be represented by a vector in the complex plane called a phasor
A sinusoidal signal f(t)=A·cos(ωt+θ) can be represented by a phasor F=Aejθ,
which is a vector in the complex plane with length A, and an angle θ measured in the counterclockwise
direction. If we multiply F by ejωt, we get a vector that rotates
counterclockwise with a rotational velocity of ω. The real part of this vector is equal to f(t).
\[f\left( t \right) = \operatorname{Re} \left\{ {{\mathbf{F}}{e^{j\omega t}}} \right\} = \operatorname{Re} \left\{
{A{e^{j\left( {\omega t + \theta } \right)}}} \right\} = \operatorname{Re} \left\{ {A\left( {\cos (\omega t +
\theta ) + j\sin (\omega t + \theta )} \right)} \right\} = f\left( t \right) = A\cos \left( {\omega t + \theta }
\right)\]
The phasor, F, is a constant. We need to know the frequency, ω, in order to make a
rotating vector and to determine the time domain function f(t).
Key Concept: Multiplying a phasor by a complex number
Multiplication of a phasor by a complex number yields a scaled and phase shifted phasor at the same frequency.
Start with a function of time, f(t)=A·cos(ωt+θ)
Represent it as a phasor F=A∠θ
If we multiply F by a complex constant X=M∠φ we get a new phasor Y =F·X=A·M∠(θ+φ)
y(t)=A·M·cos(ωt+θ+φ)
The resulting function, y(t), is a sinusoid at the same frequency as the original function, f(t), but scaled in magnitude by M and shifted in phase by φ.
Key Concept: Integration and differentiation of signals represented by phasors.
Though we won't dwell on it here, one of the important reasons we use phasors is because it turns the problem of differentiation and integration to an algebraic problem. If we have function f(t), the phasor representation is F, and the rotating vector is Fejωt.
Differention: If we differentiate f(t), we differentiate the rotating vector and get jωFejωt. So the differentiated phasor is jωF.
Integration: If we integrate f(t), we integrate the rotating vector and get (1/(jω))Fejωt. So the integrated phasor is (1/(jω))F.
This is summarized below, where the arrow denotes that the time domain function is represented by a phasor.
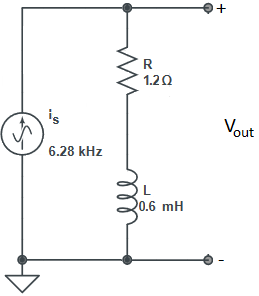
To understand why phasors are useful, consider the circuit shown which shows a current source driving a series
combination of a resistor and inductor. The input is a sinusoidal current, Is(t) at
6.28 kHz = 1000 rad/sec, and the output is the voltage across the elements, Vout(t).
We'll do it first with brute force, and then show how phasors can make this easier. Note: this
won't be a full explanation of how phasors work - if you need that you should check a circuits textbook or do a
search for material on line.
The hard way
Let us assume the input current is $i_s (t)=2 \cdot cos(1000 \cdot t)$, with ω=1000 rad/sec.
The voltage across the resistor is $R \cdot i_s(t) = R \cdot (2 \cdot cos(1000t) = 2.4·cos(1000 \cdot t)$
The voltage across the inductor is $L \frac{d i_s(t)}{dt} = L \cdot ( -2 \omega sin(\omega t)) = -1.2 \cdot
sin(1000 \cdot t)$
The voltage across both elements is simply the sum of these two results, $V_{out}(t)=2.4 \cdot cos(1000 \cdot t)
- 1.2sin(1000·t)$.
We can use a trig identity (a·cos(x)+b·sin(x)) = c·cos(x+φ) where $c=\sqrt{a^2+b^2}$
and φ=-atan2(b,a).
This technique of taking derivatives and recombining sine and cosine terms using trigonometric
identities quickly becomes tedious, difficult and error prone. It turns out the problem is greatly simplified by using phasors.
Note: adding a phase angle to the input presents no particular difficult - whatever phase (i.e., a
time delay) we add to the input, we also add to the output. In the example above if the input had been
2·cos(1000·t+30°) the output would be
2.68·cos(1000·t+30°+ 26.6°) = 2.68·cos(1000·t+56.6°)
The easier way: Using phasors
We will make use of the fact that the derivative of a rotating phasor is just a rotating phasor whose magnitude is
multiplied by ω and whose phase is shifted by 90° Consider:
The rotating phasor is Fejωt, so the derivative of the rotating
phasor is jωFejωt. We represent this as the phasor jωF.
The calculations above can be simplified using phasors. Start by assuming the input current is a phasor of
magnitude 2, with phase of 0. Is=2∠0.
The voltage phasor across the resistor is R·Is.
Since the voltage across the inductor is simply the inductance times the derivative of the current, we can
write the voltage phasor as jωL·Is(see "Key Concept", above, for explanation).
The voltage across both elements is simply the sum of these 2 phasors, (R+jωL)·Is,
Since Z = R+jωL is just a complex number we can write as magnitude and phase
$\mathbf{Z} = R + j\omega L = 1.2 + j0.6 = M \angle \phi$
So the phasor representing the output voltage, using the phasor form of Ohm's law, is Vout = Is·Z =(2∠0)·(1.34∠26.6°) = 2.68∠26.6°
Vout(t)=2.68·cos(1000·t+26.6°). This calculation require only algebra. It was computationally easier than the previous method,
which required the use of calculus and trigonometric identities, though it was conceptually harder because of the use of
complex numbers and phasors. It is easier to understand with a visual example. The demo below demonstrates the example of a current phasor multiplied by an impedance to get voltage. Note that the solution uses only algebra.
Phasor Demo
The diagrams below illustrate the relationship between the phasor I, the complex number Z, the phasor V=I·Z, as well as i(t) and v(t). There are sliders for changing
the magnitude and phase of I and Z as well as ω and t. Z can also be defined in terms of its real and imaginary parts and the value of t can also be changed by clicking and dragging in the graph on the right, or by hitting
the "Animate" button. There is a lot going on in the Phasor Diagram, so a key is given to the right.
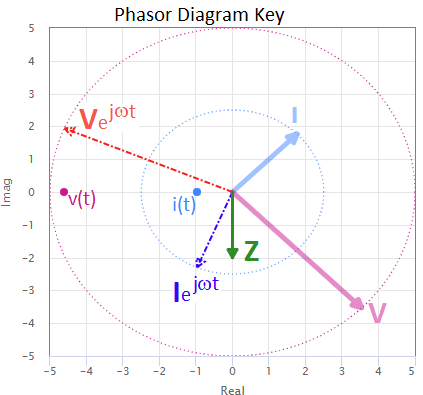
The graph on the left (the Phasor Diagram) shows:
The phasor, I=A∠θ (a complex vector), as a thick blue arrow. On the key (to the right), I=2.5∠45°
The time dependent vector, Iejωt as a thin dotted blue arrow. On the key this is shifted by a little more than 180° (π rad) from I
i(t)=Real{Iejωt}=A·cos(ωt+θ) as a blue
dot on the real axis. This is simply the real part of Iejωt. On the key i(t)≈-1.
The complex constant, Z, as a green vector. On the key this is 2∠-90°
The phasor, V=I·Z=A·M∠(θ+φ), as a thick red arrow. On the key this V=2.5·2∠(45°-90°)=5∠-45°
The time dependent vector, Vejωt as a thin dotted red arrow. On the key this is shifted by a little more than 180° (π rad) from V.
v(t)=Real{Vejωt}=A·M·cos(ωt+θ+φ) as a red
dot on the real axis. This is simply the real part of Vejωt, the thin dotted red arrow. On the key v(t)≈-4.6.
The graph on the right (functions of time) shows
i(t) for t=0 to 15 seconds shown as a blue line, with the current value of i(t) shown as a blue dot.
v(t) for t=0 to 15 seconds shown as a blue line, with the current value of v(t) shown as a red dot.
I=A∠θ (in diagram A=2.5, θ=45°), Z=M∠φ=2∠-90° (in diagram M=2, φ=-90°)
V=I·Z=(A∠θ)·(M∠φ)=A·M∠(θ+φ). (In diagram |V|=5, ∠V=-45°)
The length of V is the length of I times the length of Z.
The angle of V is the angle of I plus the angle of Z.
As time increases the vectors Iejωt and Vejωt rotate counterclockwise (at a speed determined by ω), the angle beween them is constant and equal to ∠Z.
In the diagram ∠Z=-90°, so ∠V is 90° less than ∠I. Vejωt lags Iejωt by 90° (and v(t) lags i(t) by 90°).
Test your understanding
Try each of the things below and predict what happens (none of the answers are difficult once you understand the concepts). When you can predict all of the changes, you have a good understanding of the material.
Modify the variable 'A', the length of I. How does i(t) change? How does Z change? How does V change? How does v(t) change?
Modify 'θ', the angle of I. How does i(t) change? ...Z? ...V? ...v(t)?
Modify 'M', the length of Z. How does I change? ...Z? ...V? ...i(t)? ...v(t)?
Modify 'φ', the angle of Z. How does I change? ...Z? ...V? ...i(t)? ...v(t)?
What will v(t) look like relative to i(t) if Z=0.5∠45°? This shows the power of phasors. You should be able to write down the answer without doing any calculus or differential equations.
Modify the value of 'ω'. How does I change? ...Z? ...V? ...i(t)? ...v(t)?
Though this example used voltage, current and impedance, there are many applications of phasor analysis in the study of physical systems.